+86-13858039910
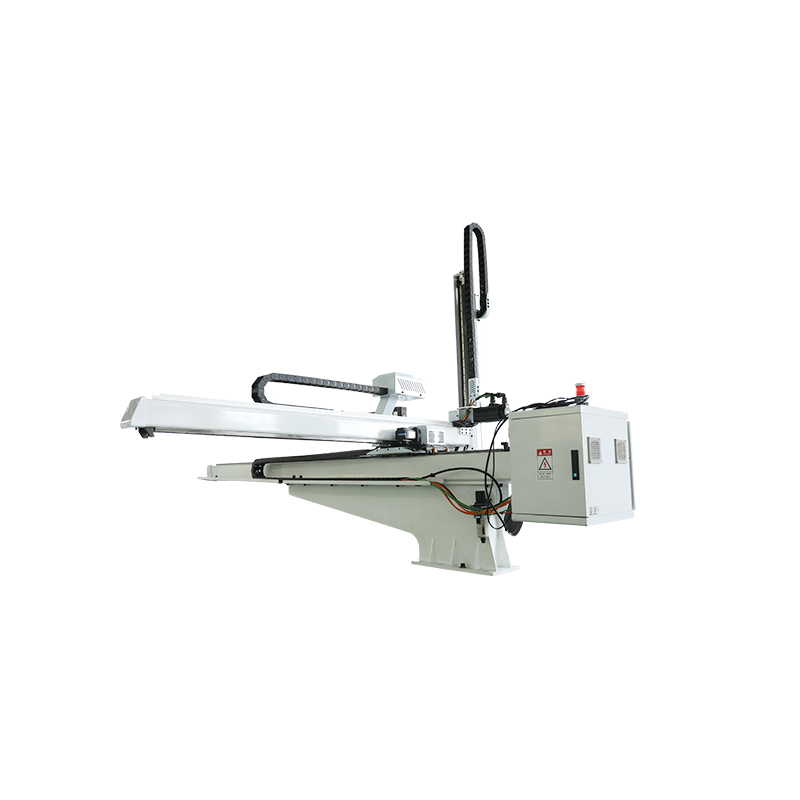
Классификация манипулятора, используемого для термопластавтоматов
Роботизированный манипулятор, используемый для термопластавтоматов, можно разделить на два типа: базовые манипуляторы для литья под давлением и интеллектуальные манипуляторы для литья под давлением.
Базовый манипулятор для литья под давлением обычно включает в себя программу фиксированного режима и программу режима обучения в соответствии с требованиями производственного процесса. Программа с фиксированным режимом охватывает несколько стандартных процессов производства литья под давлением с использованием промышленных контроллеров для выполнения простых, регулярных и повторяющихся действий. Программа режима обучения специально адаптирована для термопластавтоматов с особыми производственными процессами и позволяет успешно принимать товары за счет упорядоченного и безопасного выполнения основных движений.
Интеллектуальный манипулятор для литья под давлением обычно имеет такие функции, как размещение в многоточечной памяти, ожидание в любой точке и большее количество степеней свободы. Обычно используется сервопривод, который может выполнять более сложные операции с максимальной имитацией людей. Интеллектуальный манипулятор для литья под давлением может быть оснащен передовыми датчиками, чтобы он имел визуальные, тактильные и тепловые функции и стал очень интеллектуальным роботом для литья под давлением.
Устройство манипулятора для термопластавтоматов
(1) Системы исполнения
1. Руки
Рука устанавливается на передний конец руки. Внутреннее отверстие руки оснащено трансмиссионным валом, который может поворачивать или растягивать запястье, открывать или закрывать пальцы. Структура руки манипулятора имитирует человеческие пальцы и делится на три вида: пальцы без суставов, пальцы с фиксированными суставами и свободные суставы. Существуют роботы-манипуляторы с двумя, тремя и четырьмя пальцами, среди которых чаще всего используются два пальца. В зависимости от формы и размера зажимного объекта должны быть установлены зажимные головки различных форм и размеров. Так называемые руки без пальцев обычно относятся к вакуумным или магнитным присоскам.
2. Оружие
Функция руки заключается в том, чтобы направлять пальцы, чтобы точно захватить заготовку и отправить ее в желаемое положение. Для правильной работы манипулятора необходимо точно установить 3 степени свободы руки.
3. Органы
Корпус представляет собой кронштейн для установки рычагов, источников питания и различных исполнительных механизмов.